Flexure mechanisms for upper-limb support
Towards compliant wearable assistive devices
Dissertation
Supplementary &
Additional Materials
Chapter 2
Gravity Balancing Flexure Springs for an Assistive Elbow Orthosis
Supplementary file 2 — Animation_A.gif
Animated image showing the deflection and stress distribution of the optimized constant thickness beam design. Axes in m, color map in MPa.
https://vimeo.com/504081795/7554ba1adf
Supplementary file 3 — Animation_B.gif
Animated image showing the deflection and stress distribution of the optimized variable thickness beam design. Axes in m, color map in MPa.
https://vimeo.com/504081818/5728017100
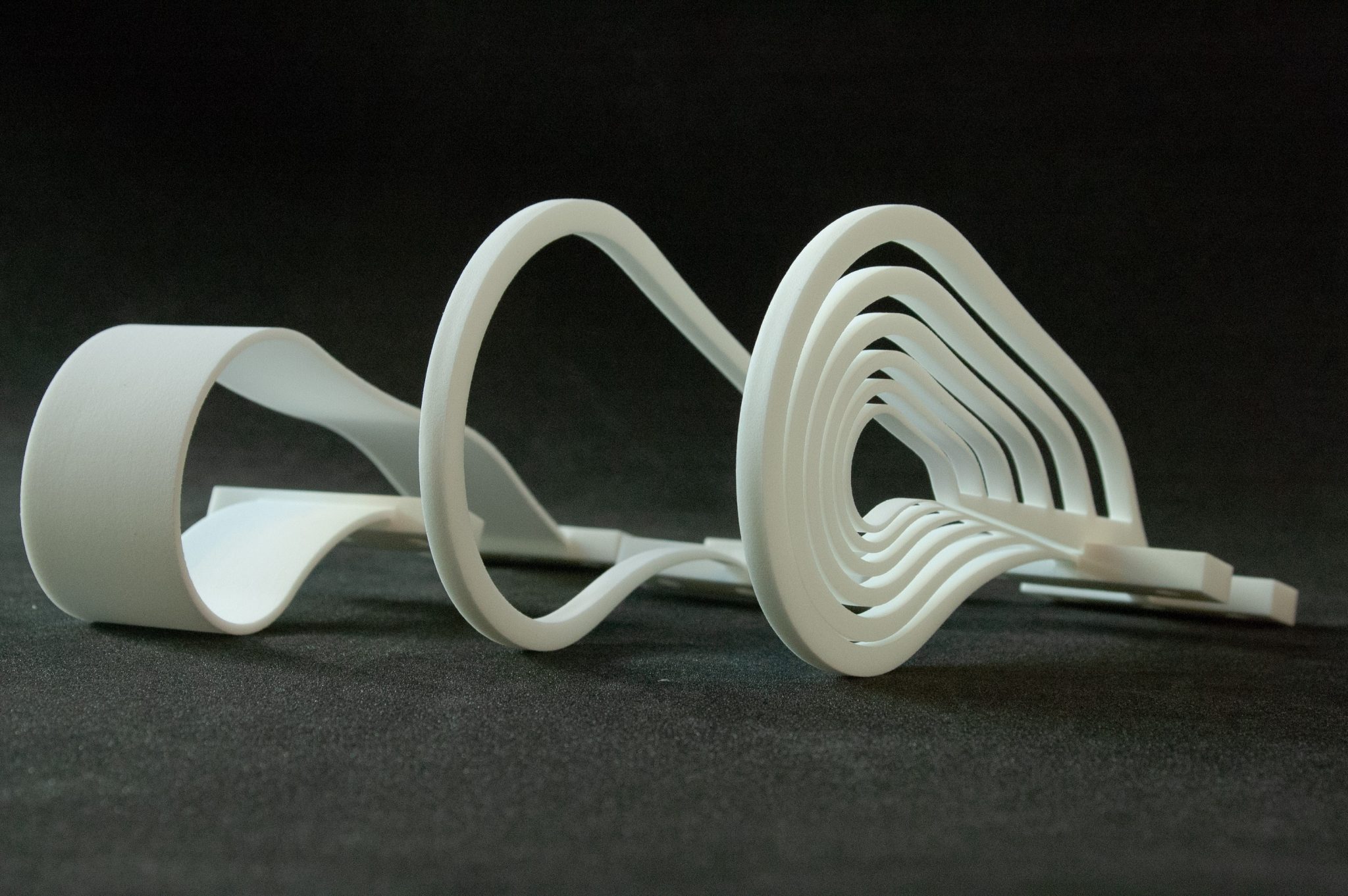
Supplementary file 4 — Animation_C.gif
Animated image showing the deflection and stress distribution of the optimized nested beam design. Axes in m, color map in MPa.
https://vimeo.com/504081857/bb6bfb974f
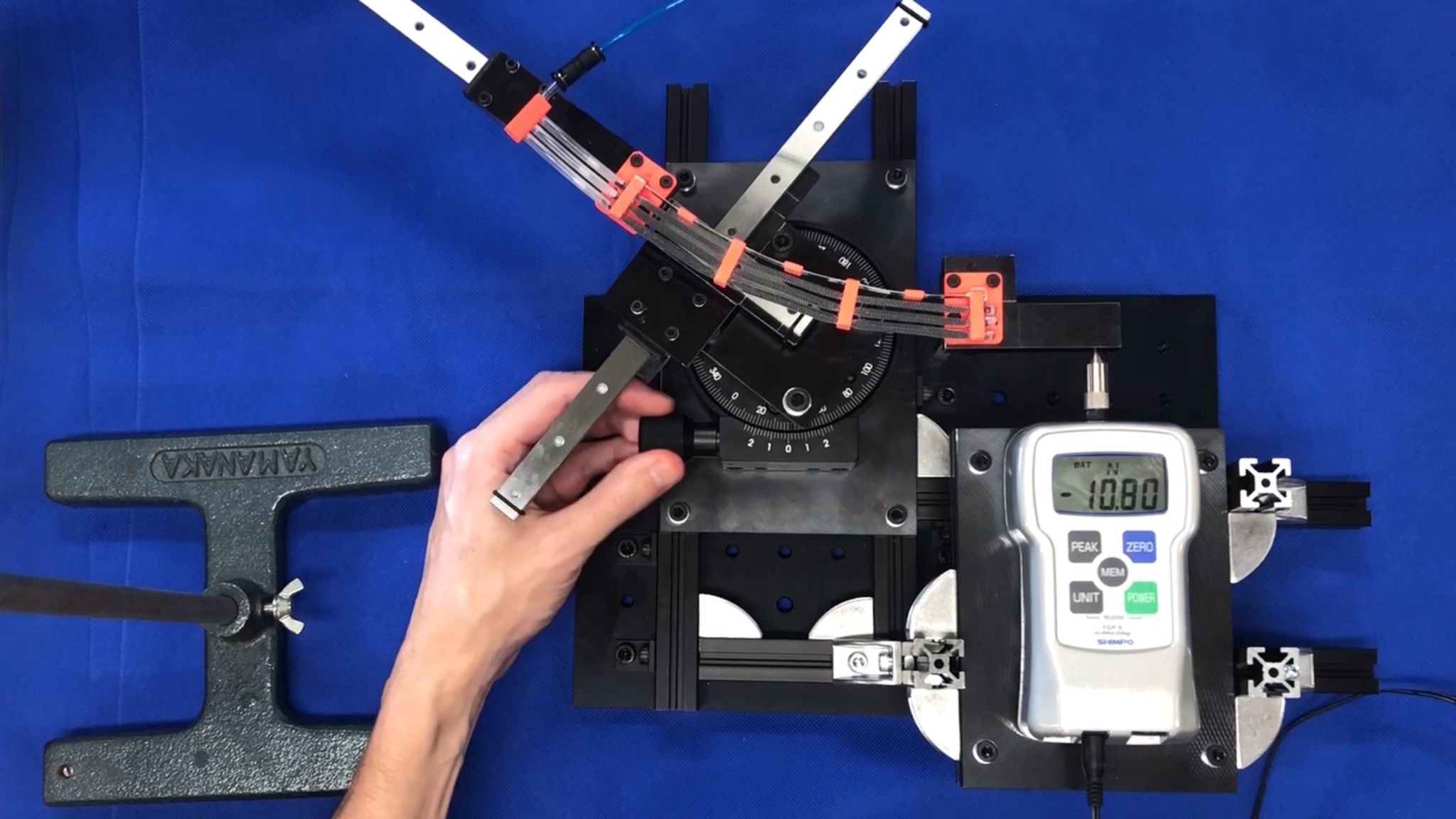
Supplementary file 5 — Experiment.mp4
Movie showing the nested beam design performing one load cycle on the test setup. The movie has an increased playback speed of four times.
https://vimeo.com/504081954/3eb8925de8
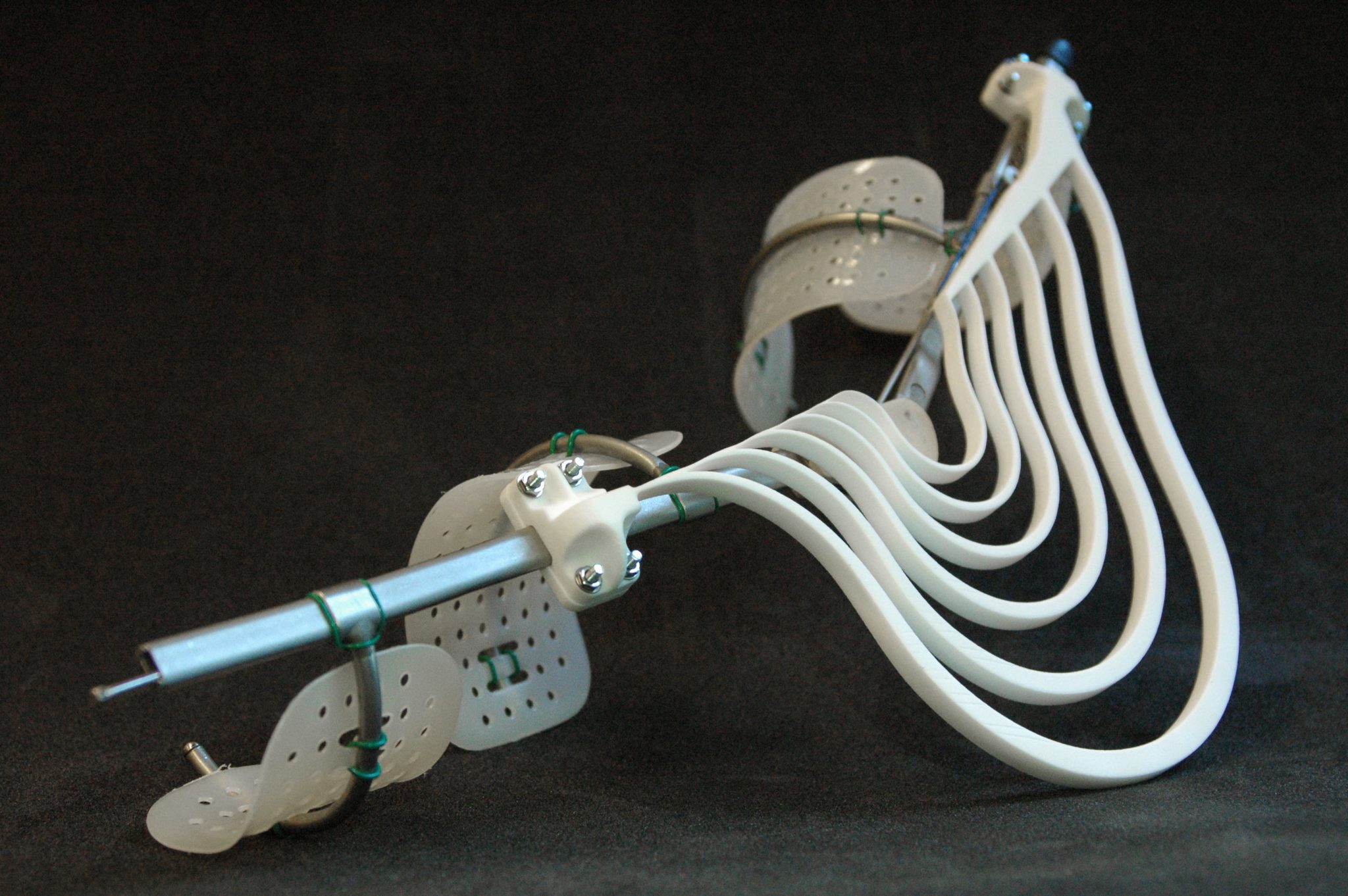
Supplementary file 6 — Wearable_Prototype.mp4
Movie showing the wearable prototype worn and used by a healthy subject.
https://vimeo.com/504082459/c054920754
Chapter 3
Gravity Balancing Flexure Spring Mechanisms for Shoulder Support in Assistive Orthoses
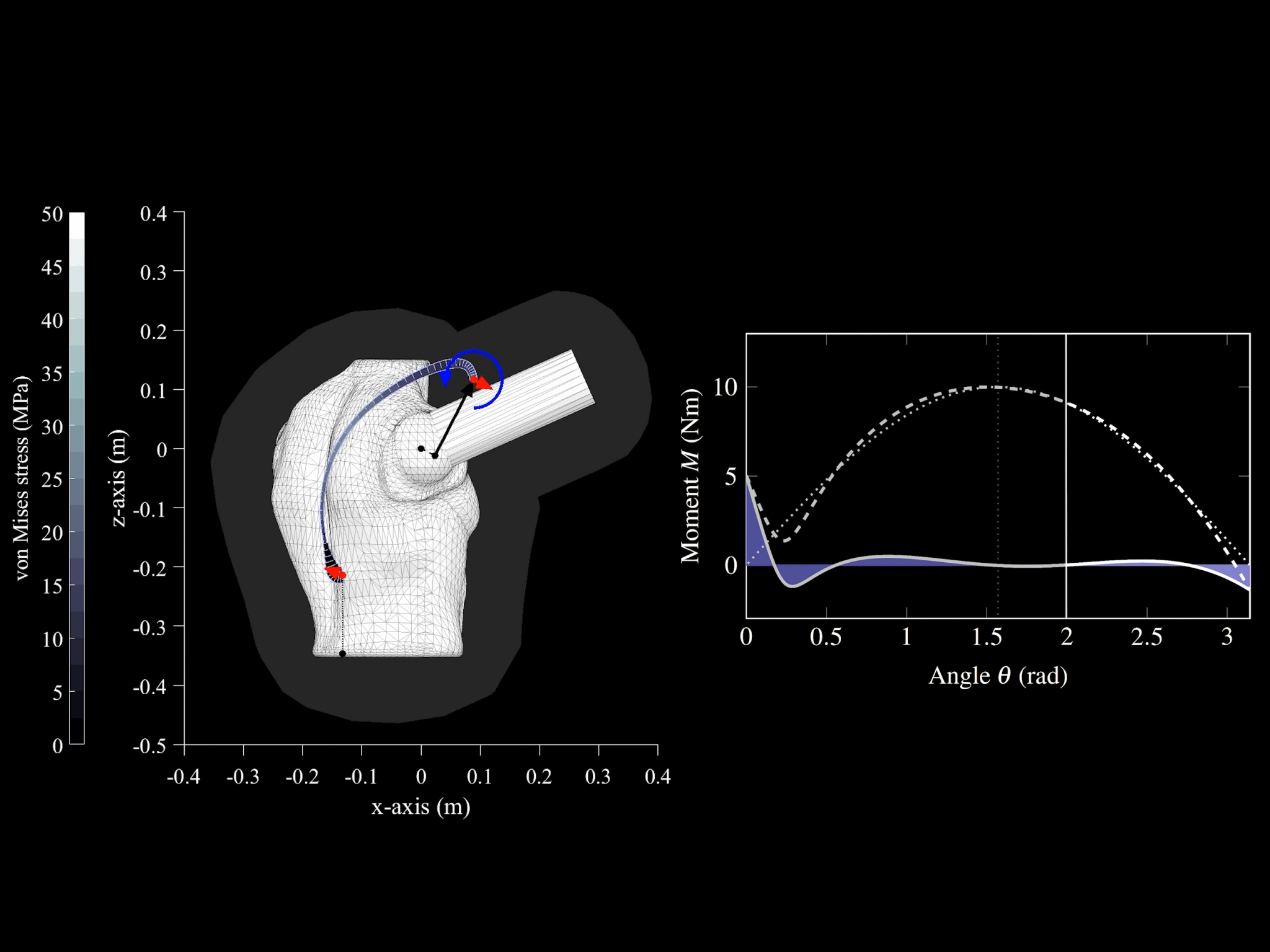
Supplementary file 3 — Simulations.mp4
Movie showing the full animations of all simulated mechanisms shown in Figures 3.3 to 3.7, in juxtaposition to the graphs from supplementary file 1.
https://vimeo.com/504066384/f6c3311f2c
Supplementary file 4 — Prototype_A.mp4
Movie showing the full animation and photo time lapse corresponding to Figure 3.10, in juxtaposition to the graphs in Figures 3.8 and 3.9 for design A.
https://vimeo.com/504069377/9a3edbee46
Supplementary file 5 — Prototype_B.mp4
Movie showing the full animation and photo time lapse corresponding to Figure 3.11, in juxtaposition to the graphs in Figures 3.8 and 3.9 for design B.
https://vimeo.com/504069601/53bc8096df
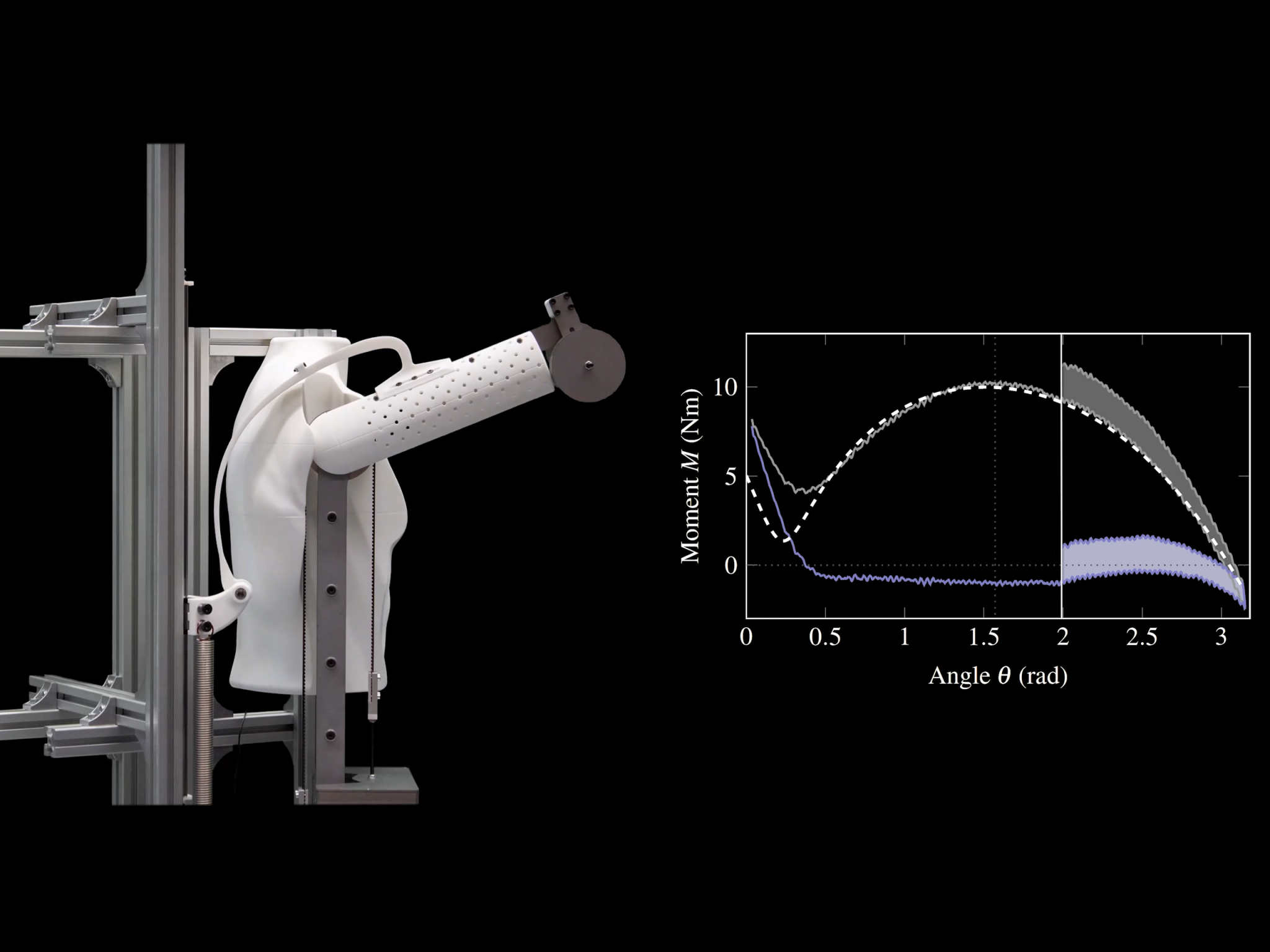
Supplementary file 6 — Prototype_A_Experiment.mp4
Movie showing the experiment of A from several different angles.
https://vimeo.com/504069860/6eccb6ae50
Supplementary file 7 — Prototype_B_Experiment.mp4
Movie showing the experiment of B from several different angles.
https://vimeo.com/504070417/dbe856d0cf
Additional file 1 — Simulations_(white).mp4
Alternative version of Supplementary file 3 with a white background
https://vimeo.com/504068085/a7a6720a2b

Chapter 5
A Compact McKibben Muscle Based Bending Actuator for Close-to-Body Application in Assistive Wearable Robots
Supplementary file 1 — supp1-2975732.mp4
Video showing the actuator concept, animations of the optimized results, the experimental setup as well as the wearable prototype.
https://vimeo.com/504091289/0f0b920dc6
Additional file 1 — ICRA20_MoB22.4.mp4
Video Presentation MoB22.4
ICRA 2020 – Virtual Conference,
Paris, France
https://vimeo.com/504093087/bec2ee4e10